基于 Arduino 的解魔方机器人一些总结
· 阅读需 4 分钟
这篇主要补齐“软件怎么做才能跑起来”:Android 上位机负责识别与求解,下位机负责稳定执行动作。重点在模块拆分、通信协议、调试路径。

把“设计”变成“可运行的机器”。建议按下面顺序联调,每一步都能独立验证,不要一上来就整机联调。

这篇作为“初步设计”的补充,重点把能落地实现的关键点写清楚:系统拆分、数据流/控制流、通信协议、电源与舵机控制、调试路径。
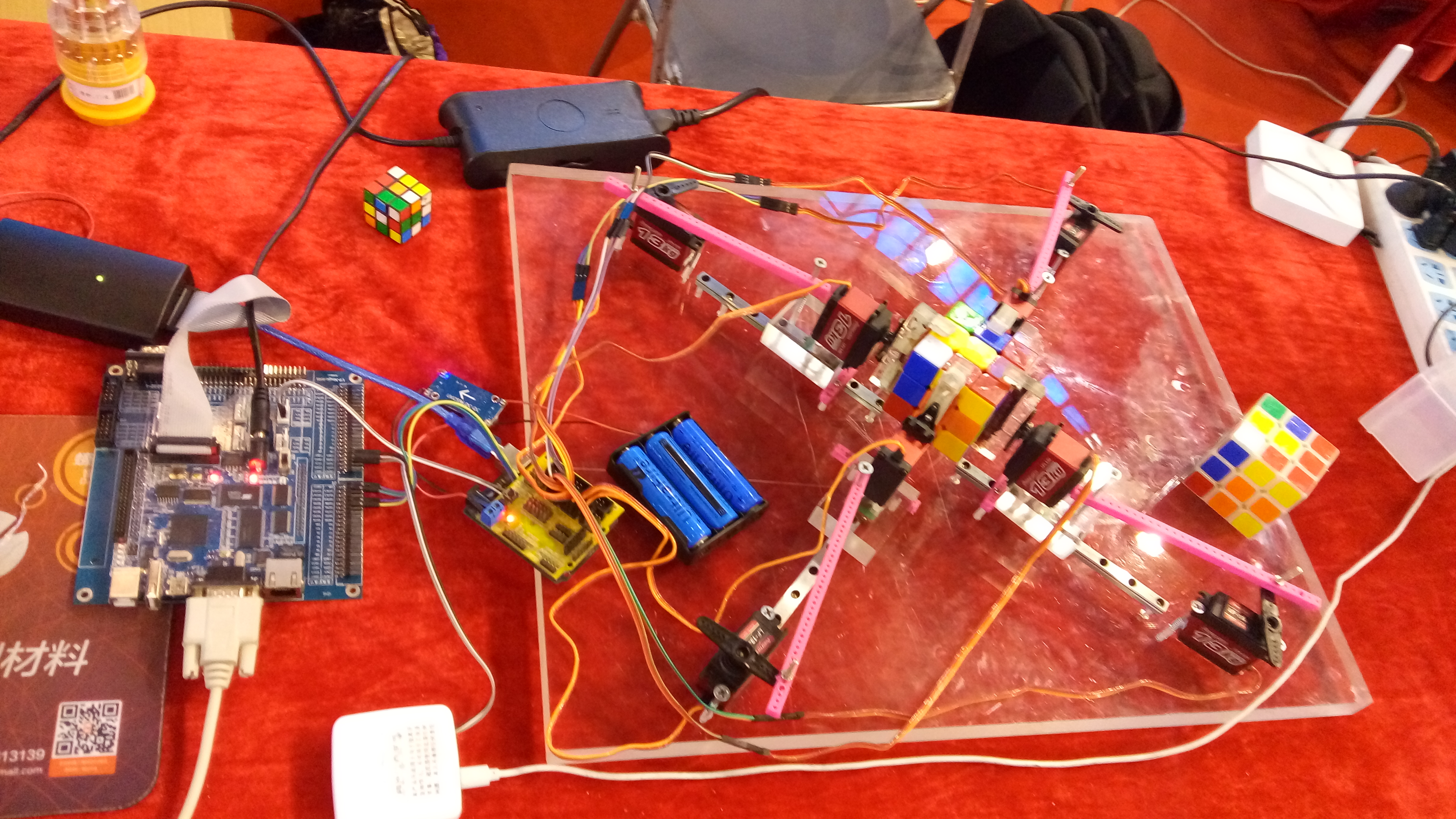
0x01 材料 Android手机(摄像头正常) 魔方(5.7cm,非地摊货) 亚克力板(充当底板部分以及部分机械手) 舵机(因采取四向导轨式,所以大致需要8个舵机) 舵机控制板? xxx控制板。 开发用的计算机一台(配置好安卓开发环境,以及keil等,本次采用android studio) 光滑小轮 螺丝 0x02 整体结构 整体主要有四种结构。 四向推进式
0x01 与原项目进行同步 在github里,每当fork一个项目后,如何保持与原作者的同步?一般可以以下几步。
0x01 前言 转眼之间大学已度一半有余,没有了刚来大学的不习惯,逐渐地在寻找自己的那一只方向,从建立社团,到建立小组,以及各方面的为人处世,慢慢地提高自己,并且在所学领域希望也可以有一定的思考。 0x02 起 寒假里学习php代码审计以及一些安全方面基础部分的知识,假期结束后,和一些同学一块讨论去做三维的农大地图,使用3dmax或者maya进行绘制模型,后来也许因为分歧等原因,退出了相关活动,另外自己设备的落后也跟不上他们,还是他们弄...
0x01 搭建环境 Linux(Ubuntu)
0x01 git GIT最初是由Linus Benedict Torvalds为了更有效地管理Linux内核开发而创立的分布式版本控制软件,与�常用的版本控制工具如CVS、Subversion不同,它不必服务器端软件支持,速度和效率也有着相当程度的提高。
0x01 安装系统 需进入开发者模式,在关机状态下,按住Esc+F3(刷新)+电源键,启动Chromebook,看到ChromeOS系统损坏的界面以后(顺带一提,按方向键可以切换成不同的语 音;需要重装ChromeOS的话就在这个界面里插入ChromeOS恢复U盘,google下载)按Ctrl+D,系统提示是否确认要进入开发者模式,回车确认。然后等待系统重启,第一次重启会显示修复系统,耐心等待就可以了,从��此系统就进入开发者模式。注意一旦...