CNUTCon全球容器技术大会有感
· 阅读需 8 分钟
0x01 前言 作为容器技术的发展,自认为是互联网技术公司的基础设施架构的不可或缺的一部分,并且好多公司都在实践,并且创业公司也可以利用其加快开发,缩短构建部署等消耗的时间。 很少有像docker这样才推出两年多就很火的样子,并且拿到了好多投资,😃,作为变化很快的IT行业,不掌握点新技术,很难在竞争中生存下来。
0x01 前言 作为容器技术的发展,自认为是互联网技术公司的基础设施架构的不可或缺的一部分,并且好多公司都在实践,并且创业公司也可以利用其加快开发,缩短构建部署等消耗的时间。 很少有像docker这样才推出两年多就很火的样子,并且拿到了好多投资,😃,作为变化很快的IT行业,不掌握点新技术,很难在竞争中生存下来。
0x01 前言 在设置界面的开发时,以前往往通过自己写界面,在没有合适美工时,比较费时费力,尤其是以前需要兼容Android2.3的时候。当3.0以后出现了PreferenceFragment,可以快速地完成一个类似于系统设置的偏好设定界面。
0x01 更改默认ssh登录端口 一般ssh是开放的,容易受到攻击或者爆破等行为。 vim #vi /etc/ssh/sshd_config
这篇主要补齐“软件怎么做才能跑起来”:Android 上位机负责识别与求解,下位机负责稳定执行动作。重点在模块拆分、通信协议、调试路径。

把“设计”变成“可运行的机器”。建议按下面顺序联调,每一步都能独立验证,不要一上来就整机联调。

这篇作为“初步设计”的补充,重点把能落地实现的关键点写清楚:系统拆分、数据流/控制流、通信协议、电源与舵机控制、调试路径。
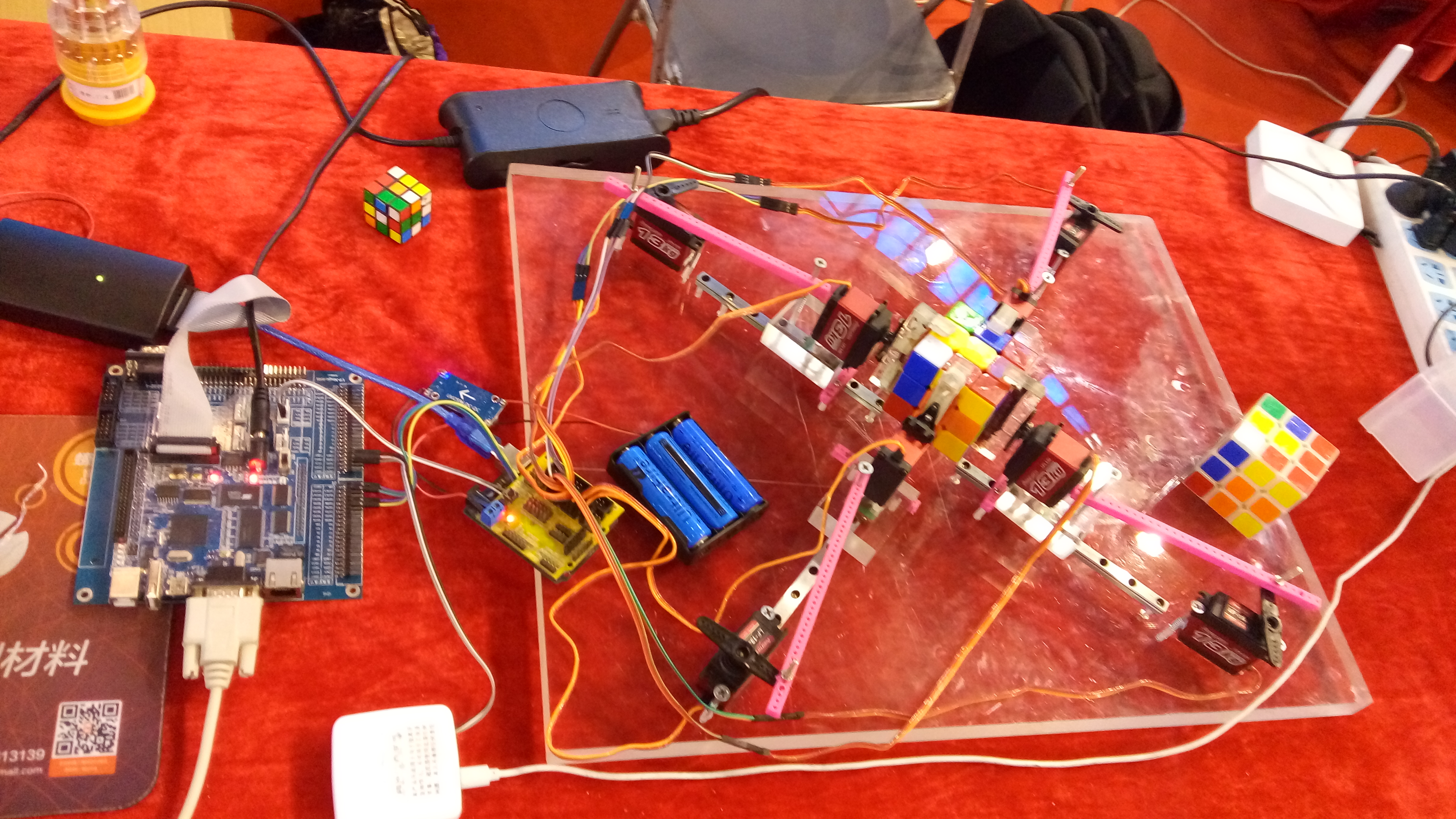
0x01 材料 Android手机(摄像头正常) 魔方(5.7cm,非地摊货) 亚克力板(充当底板部分以及部分机械手) 舵机(因采取四向导轨式,所以大致需要8个舵机) 舵机控制板? xxx控制板。 开发用的计算机一台(配置好安卓开发环境,以及keil等,本次采用android studio) 光滑小轮 螺丝 0x02 整体结构 整体主要有四种结构。 四向推进式
0x01 与原项目进行同步 在github里,每当fork一个项目后,如何保持与原作者的同步?一般可以以下几步。
0x01 前言 转眼之间大学已度一半有余,没有了刚来大学的不习惯,逐渐地在寻找自己的那一只方向,从建立社团,到建立小组,以及各方面的为人处世,慢慢地提高自己,并且在所学领域希望也可以有一定的思考。 0x02 起 寒假里学习php代码审计以及一些安全方面基础部分的知识,假期结束后,和一些同学一块讨论去做三维的农大地图,使用3dmax或者maya进行绘制模型,后来也许因为分歧等原因,退出了相关活动,另外自己设备的落后也跟不上他们,还是他们弄...